Echosounder System Design - Sea Trial of the System
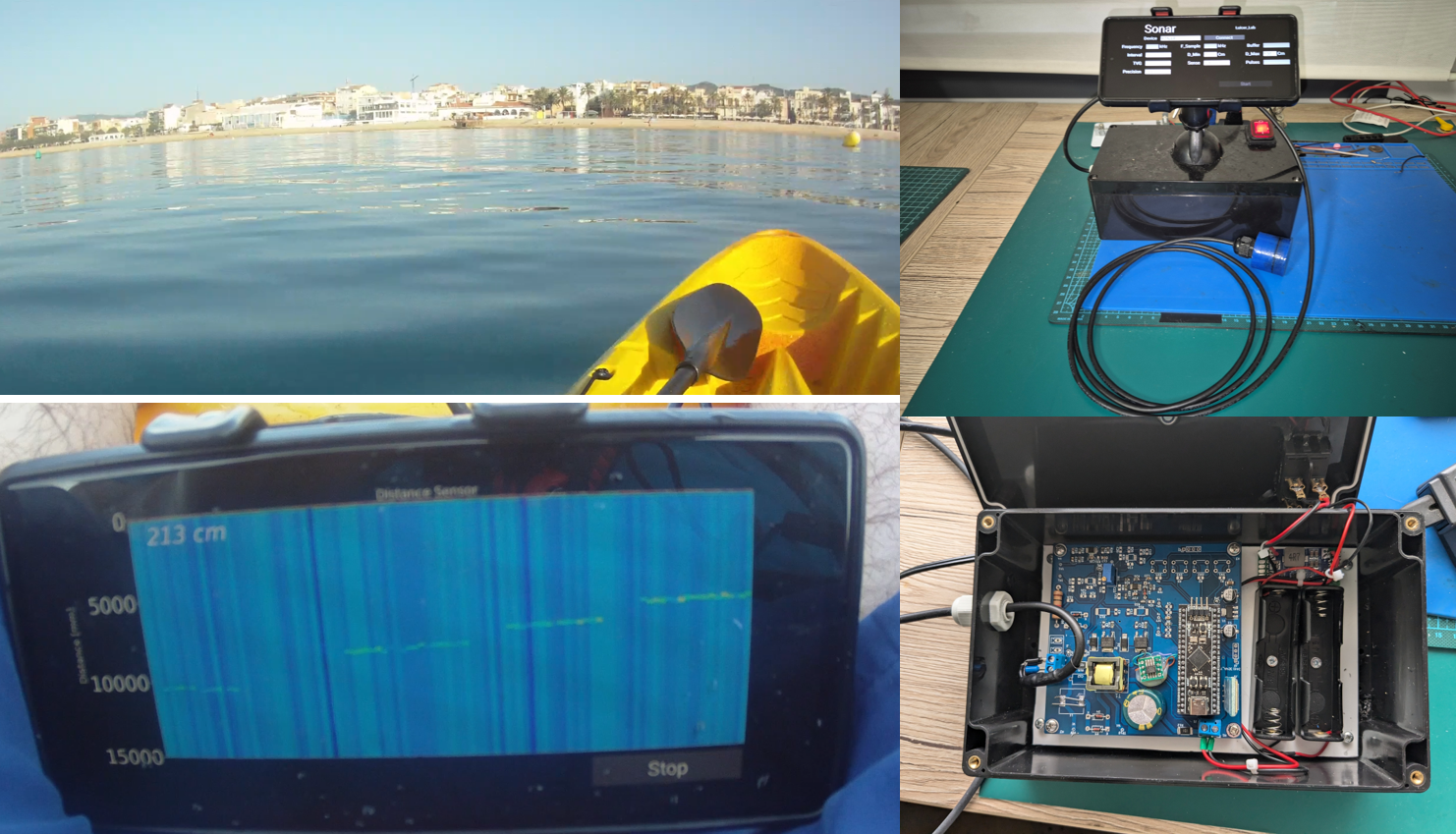
This post presents the real sea trial of a low-cost echosounder system, including the design of the waterproof enclosure, the visualization app, and the results obtained under real conditions.